OttoClaw
OttoClaw is an AI-powered desktop humanoid robot system built on the ESP32-S3 and FreeRTOS. It features a local lightweight agent that handles conversation, memory, and autonomous physical movements through six servos without relying on cloud servers, utilizing LVGL for its graphical interface and SPIFFS for local data persistence.

OttoClaw is a localized AI desktop humanoid robot system developed by FlashCat Technology. Built on the ESP32-S3 platform, it represents a departure from traditional AI toys by running a lightweight agent entirely on the edge. The system is designed to be a quiet, non-intrusive companion that expresses itself through physical movement and digital messaging rather than voice, making it ideal for desk environments where silence is preferred.
Core Philosophy and Emotional Intelligence
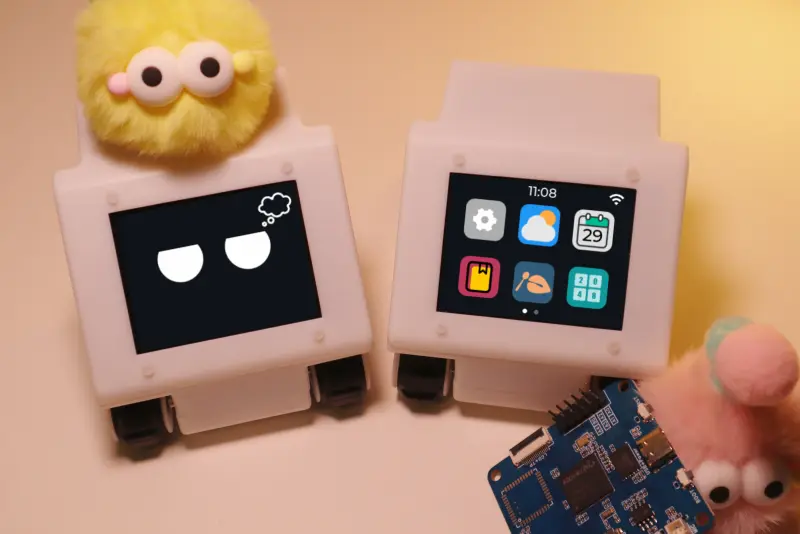
At the heart of the project is the concept of an AI with autonomous emotional expression. Unlike robots that react only to direct user triggers, OttoClaw features 22 distinct emotional states—including happiness, shyness, anger, and boredom—that fluctuate based on the context of conversations. These emotions are manifested through a 1.54-inch LCD screen and physical gestures, such as swaying when happy or hiding its face when shy.
Complementing this is a sophisticated personality and growth system. The robot builds a relationship with the user over time, progressing through five stages from “Stranger” to “Kinship.” This bond is visualized via heart icons on the display, and the robot’s responses evolve as it gathers more information about the user’s preferences and history.

Technical Architecture and Local Execution
The system is engineered for efficiency and privacy, running a pure C and FreeRTOS stack on a single ESP32-S3 chip. By operating at 0.5W, it can remain online 24/7 without the overhead of heavy operating systems like Linux. All session data, personality traits, and long-term memories are stored locally in the device’s SPIFFS partition, ensuring that interactions remain private and do not depend on a proprietary cloud backend.

The software architecture utilizes a dual-core approach: one core handles network I/O and communication protocols, while the second core runs the AI Agent loop. The robot supports the Anthropic tool-use and ReAct cycle patterns, allowing the Large Language Model (LLM) to autonomously decide when to call specific tools or perform physical actions.
AI-Driven Physical Expression
A standout feature is the AI Servo Sequences system. Instead of relying purely on pre-scripted animations, the AI interprets semantic meaning to design new postures. When a user asks for a specific gesture, the LLM calculates the necessary angles for the six servos to achieve that pose. This allows the robot to “imagine” and execute physical movements that match its current dialogue or emotional state, such as leaning forward to show interest or raising its hands to celebrate.

Hardware Integration and Ecosystem
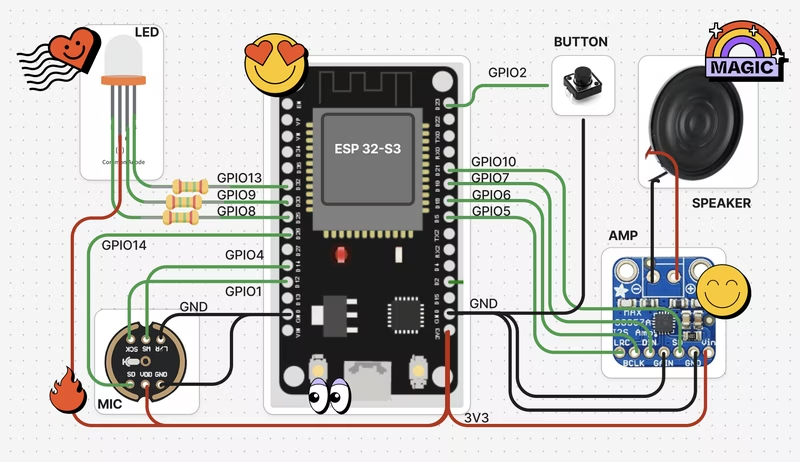
The hardware is based on the Shanmao OttoRobot AI development board, a comprehensive platform that integrates a microphone, display, speaker with amplifier, power management, capacitive touch, and 6-way servo control. The project is fully open-source, providing PCB designs, BOM lists, and 3D-printable STL files for the chassis.
Interaction is primarily handled through DingTalk via a Stream-mode connection, which avoids the need for a public server or complex port forwarding. This setup allows for a secure, text-based interface that fits seamlessly into a professional or study workflow. For developers, the system also offers a WebSocket API and a serial CLI for advanced configuration and monitoring.
Getting Started
Deploying the system involves flashing the firmware to an ESP32-S3 board and configuring the device through a mobile-friendly captive portal. Users can choose between OpenAI-compatible or Anthropic-compatible LLM providers. Once connected to Wi-Fi and configured with an API key, the robot automatically begins its relationship-building process, recording daily notes and user preferences to its local storage to maintain continuity across reboots.
Related Projects

StackChan Minimal
An AI companion robot project for the M5Stack AtomS3R that connects an ESP32-based body to local AI services. It supports speech recognition, local LLM chat, and text-to-speech integration while providing a hardware interface for sensors and servos.

XiaoClaw: AI Voice Assistant with Local Agent Brain
XiaoClaw is an integrated firmware for the ESP32-S3 that combines voice interaction with a local AI agent. It utilizes the ESP-IDF framework and FreeRTOS to provide a complete system for voice I/O, LLM-powered reasoning, tool calling, and autonomous task execution.
OpenToys
OpenToys is an open-source framework for building local voice AI companions and robots using ESP32-S3 hardware and Apple Silicon for edge processing. It leverages Whisper ASR, Qwen3-TTS, and MLX-optimized LLMs to provide a fully offline, multilingual conversational experience without cloud dependencies. The project includes a desktop control application built with Tauri and React, alongside specialized Arduino-based firmware.

QBIT
QBIT is an open-source desktop companion robot and personal IoT avatar based on the ESP32-C3. It features a custom monochrome animation system, integrated Wi-Fi management via NetWizard, and seamless Home Assistant integration through MQTT. The project includes a full-stack web platform for remote interaction, device claiming, and community animation sharing.
Echo-Mate Desktop Robot
A feature-rich desktop robot and development platform based on the Rockchip RV1106 SoC. It integrates an LVGL-based menu system, AI-powered chat and translation, and hardware-accelerated AI camera features using the onboard 1TOPS NPU.