TNY-360 Quadruped Robot
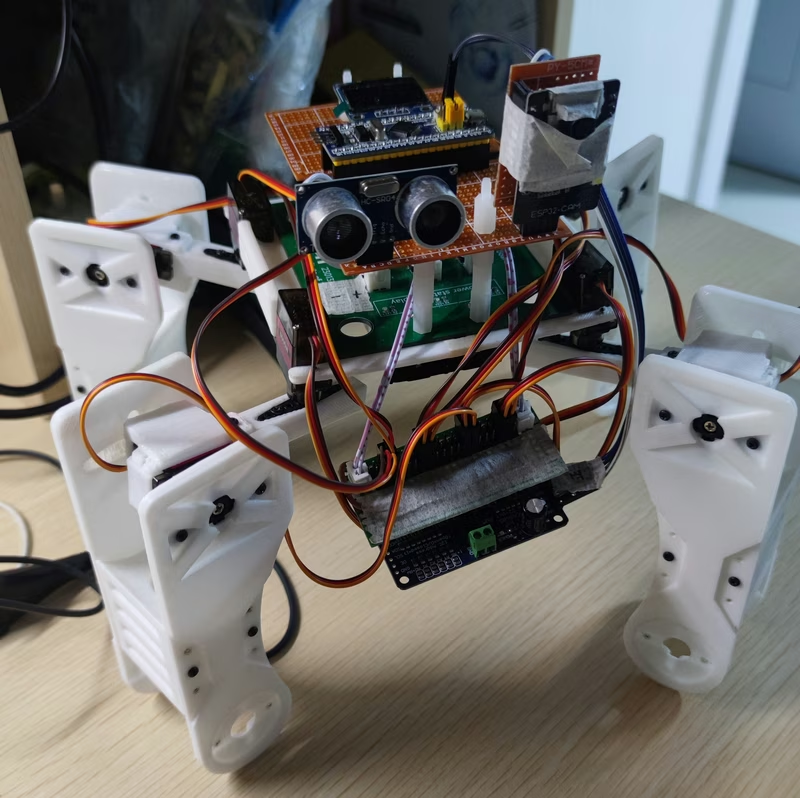
TNY-360 is an open-source, 12-DOF quadruped robot designed for research and interaction, powered by the ESP32-S3 microcontroller. It utilizes the ESP-IDF framework and FreeRTOS to manage complex tasks like inverse kinematics, computer vision via an OV2640 camera, and human-robot interaction. The project features a fully 3D-printable chassis and integrated sensors including Lidar, IMU, and I2S audio.

The TNY-360 is a sophisticated, open-source quadruped robot designed to bridge the gap between hobbyist robotics and advanced research platforms. Built around the powerful ESP32-S3 N16R8, this compact robot dog is engineered for high-performance motion, edge computing, and human-robot interaction (HRI). By combining a custom-designed 3D-printable chassis with a suite of advanced sensors, the TNY-360 provides a versatile foundation for exploring quadrupedal locomotion and artificial intelligence.
Hardware Architecture and Motion Control
At the heart of the TNY-360’s physical capabilities is a 12-degree-of-freedom (DOF) movement system. Unlike standard budget quadruped designs that rely on open-loop servo control, the TNY-360 utilizes modified MG996R servos. These actuators are enhanced with analog position feedback, allowing the firmware to read the actual position of the joints. This closed-loop approach is critical for implementing precise inverse kinematics and ensuring the robot can adapt to varying terrain or external forces.
The system is powered by a 3S LiPo battery (utilizing six Samsung INR18650-25R cells) and monitored by an INA219 sensor for real-time voltage and current tracking. A PCA9685 16-channel PWM driver manages the high-density actuator requirements, while the ESP32-S3 handles the high-level logic and communication.
Sensing and Interaction
The TNY-360 is equipped with a comprehensive sensor suite that enables it to perceive its environment:
- Vision: An OV2640 camera module provides a visual feed for object tracking and computer vision tasks.
- Depth Perception: A VL53L0X Time-of-Flight (ToF) Lidar sensor measures distances to obstacles in front of the robot.
- Orientation: An MPU6050 6-axis IMU provides real-time data on the robot’s pitch, roll, and yaw, enabling active balancing and gait stabilization.
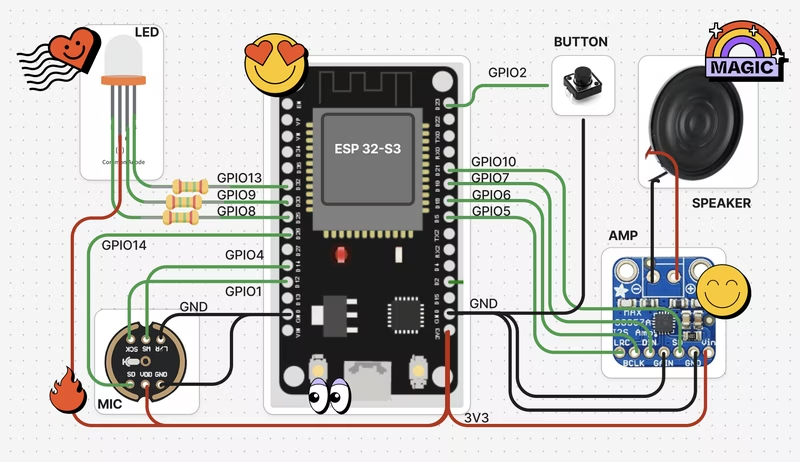
Beyond environmental sensing, the robot is designed for interaction. It features an “OLED face” (SH1106 128x64 display) to express status or emotions, and an I2S MEMS microphone and speaker for audio-based interaction. This makes the TNY-360 an ideal platform for developing social robotics applications.
Firmware and Software Stack
The firmware is built using the ESP-IDF (Espressif IoT Development Framework) within the PlatformIO ecosystem. Leveraging FreeRTOS, the system manages multiple concurrent tasks, such as processing camera frames, calculating gait patterns, and maintaining network connectivity.
The project makes extensive use of modern ESP32 features, including:
- LittleFS: Used for robust on-board file storage of configuration data and web assets.
- NimBLE: Provides a lightweight Bluetooth Low Energy stack for remote control and telemetry.
- WebSocket Support: The firmware includes an HTTP server with WebSocket support, enabling low-latency communication with web-based dashboards or controllers.
Development and Customization
One of the most compelling aspects of the TNY-360 is its accessibility. The chassis is 100% 3D-printable, with source files provided in FreeCAD format, allowing developers to modify the physical structure to suit their specific needs. The firmware is structured with custom components for various sensors and drivers, making it easy to extend the codebase or integrate new hardware.
Whether you are interested in mastering the mathematics of quadrupedal gaits, experimenting with edge AI for computer vision, or building a unique interactive companion, the TNY-360 provides a complete, open-source roadmap to advanced robotics.
Related Projects
STM32F103 Quadruped Robot
A sophisticated quadruped crawling robot powered by an STM32F103C8T6 microcontroller and an ESP32-CAM for real-time vision and remote connectivity. It utilizes FreeRTOS for multi-tasking and MicroPython for the wireless communication stack, supporting both cloud-based MQTT control via a mobile app and local control through a web interface.
OpenToys
OpenToys is an open-source framework for building local voice AI companions and robots using ESP32-S3 hardware and Apple Silicon for edge processing. It leverages Whisper ASR, Qwen3-TTS, and MLX-optimized LLMs to provide a fully offline, multilingual conversational experience without cloud dependencies. The project includes a desktop control application built with Tauri and React, alongside specialized Arduino-based firmware.

QBIT
QBIT is an open-source desktop companion robot and personal IoT avatar based on the ESP32-C3. It features a custom monochrome animation system, integrated Wi-Fi management via NetWizard, and seamless Home Assistant integration through MQTT. The project includes a full-stack web platform for remote interaction, device claiming, and community animation sharing.
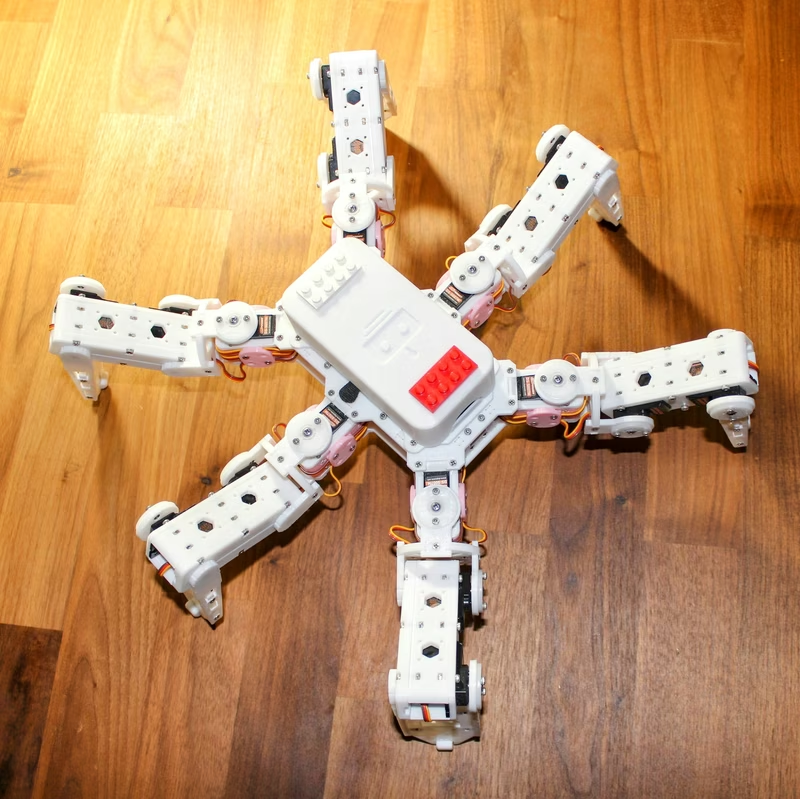
Hexapod
A 3D-printed, 18-servo hexapod robot platform designed for agility and flexibility, supporting both ESP32 and Raspberry Pi Pico controllers. The project features WiFi-enabled remote control via UDP, Over-the-Air (OTA) firmware updates, and a modular mechanical design optimized for 3D printing.