Plane Radar
An embedded flight tracking application for the ESP32-C3 Super Mini and a 1.28-inch round GC9A01 display. It visualizes live ADS-B aircraft data from adsb.fi on a sonar-style interface, providing real-time updates on aircraft headings, altitudes, and speed vectors with a captive portal for easy configuration.

The Plane Radar project is a specialized embedded application that transforms an ESP32-C3 and a round display into a dedicated aviation tracking station. By utilizing live ADS-B (Automatic Dependent Surveillance–Broadcast) data, the device provides a real-time “sonar” view of the skies, specifically tailored for the circular form factor of the GC9A01 display.
Visualizing the Skies
At the heart of the project is a custom-drawn radar interface. Unlike traditional rectangular flight trackers, this project leans into the circular geometry of its hardware. The display features a dark blue background with subdued green rings and crosshairs, creating a classic radar aesthetic. Aircraft are rendered with high-contrast symbols that provide immediate situational awareness:
- Heading and Speed: Each aircraft is represented by a red triangle pointing in its direction of travel, accompanied by a magenta speed vector.
- Dynamic Tagging: Information such as callsigns, aircraft types, and altitudes are displayed via tags that intelligently shift position to avoid the screen edges and maintain readability.
- Directional Cues: For aircraft that are within the data fetch radius but outside the current zoom level, the software places small red dots on the rim of the screen, acting as a bearing indicator for incoming traffic.
Technical Architecture
The firmware is built for the ESP32-C3 Super Mini, a compact RISC-V based microcontroller. It leverages the LovyanGFX library to handle the complexities of the GC9A01 SPI display, ensuring smooth updates and efficient rendering of the radar grid and aircraft symbols.
Data is sourced from the adsb.fi open data API. The system performs periodic fetches (defaulting to every 5 seconds) to update the positions of nearby planes. Because the display is circular, the software includes logic to translate geographic coordinates (latitude and longitude) into polar coordinates relative to the user’s home location, which is then mapped to the 240x240 pixel grid.
User Experience and Configuration
One of the standout features of the project is its ease of setup. Recognizing that hardcoding Wi-Fi credentials and GPS coordinates is cumbersome, the developer integrated a captive portal system. On the first boot, or when triggered by a long press of the BOOT button, the device acts as an Access Point named PlaneRadar-Setup. Users can connect via their smartphone to a web interface to configure:
- Local Wi-Fi credentials.
- Home Latitude and Longitude (the center of the radar).
- Preferred units (Kilometers vs. Miles).
Settings are persisted in the ESP32’s Non-Volatile Storage (NVS), ensuring the device resumes operation immediately after a power cycle. Physical interaction is handled through the single BOOT button on the Super Mini, allowing users to cycle through range presets (5, 10, 15, or 25 km) with a short tap.
Hardware Integration
The project is designed for a specific hardware stack that is both affordable and widely available. The wiring is straightforward, utilizing the SPI bus of the ESP32-C3:
| Display | ESP32-C3 Pin |
|---|---|
| RST | GPIO 0 |
| CS | GPIO 1 |
| DC | GPIO 10 |
| SDA (MOSI) | GPIO 3 |
| SCL (SCLK) | GPIO 4 |
| BOOT (User Button) | GPIO 9 |
For those looking to build a polished desktop gadget, the project also links to a custom 3D-printed case design, completing the transition from a breadboard prototype to a finished consumer-grade device.
Related Projects
ESP32 Flight Tracker
A real-time aircraft tracking system built for the ESP32-S3 that visualizes live flight data from the OpenSky Network API. It utilizes a dual-core FreeRTOS architecture to handle concurrent networking and high-speed rendering across a dual-display setup, featuring a hybrid map system optimized for hardware with limited PSRAM.

FlightRadar24-TTGO
FlightRadar24-TTGO is an ESP32-based firmware that provides a real-time aircraft tracking display on TTGO and LilyGo-T-Display-S3 modules. It leverages the FlightRadar24 API for live updates and uses the LVGL library to render detailed flight information and carrier logos. The project includes a web-based configuration portal for setting location parameters, units, and traffic filters.
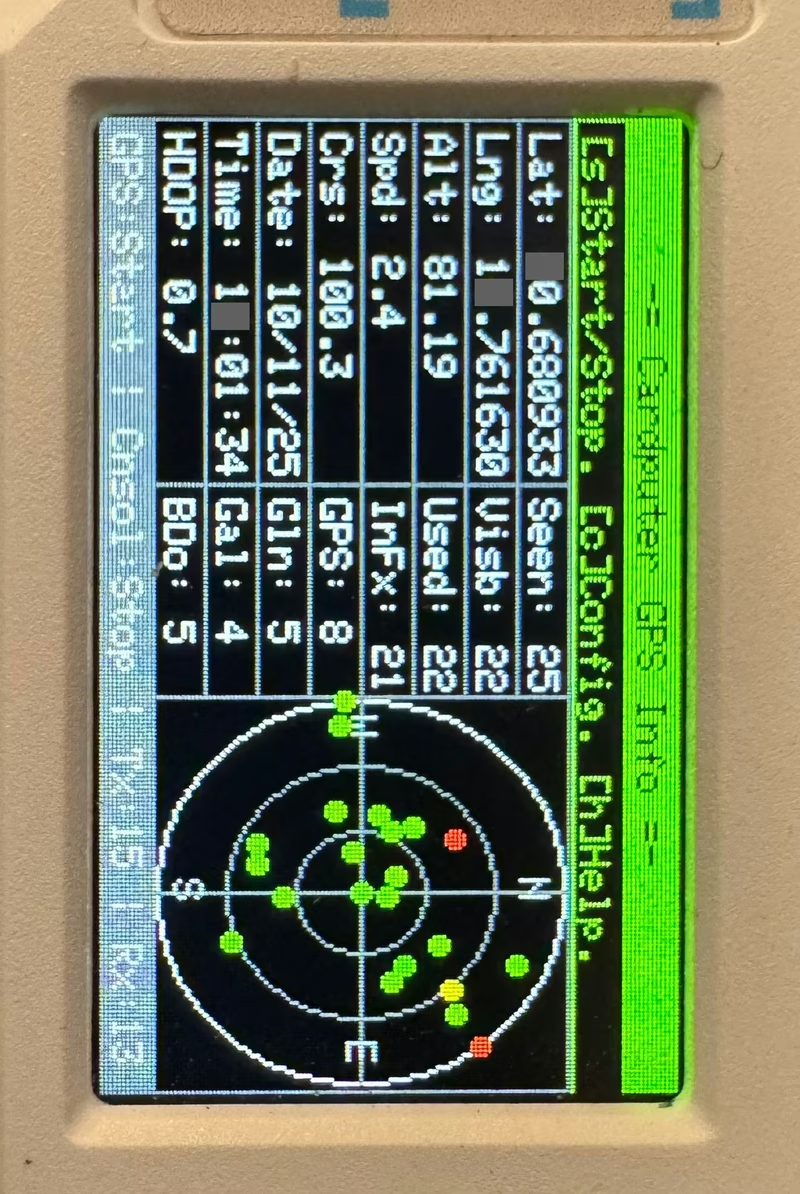
Cardputer GPS Info
A lightweight GPS diagnostic and information tool designed for the M5Stack Cardputer. It parses NMEA 0183 data using the TinyGPSPlus library to display real-time coordinates, satellite visibility, and sky plots. The project features configurable UART settings and microSD support for persistent configuration on ESP32-S3 hardware.

nearPlane ADSB Tracker
A portable real-time aircraft tracker for the M5StickC Plus 2 that utilizes the adsb.lol API to display flight telemetry and route information. It features a multi-page OLED interface, emergency squawk highlighting, and a web-based setup portal for easy configuration.