ESP32 Marauder for Cheap Yellow Display (CYD)
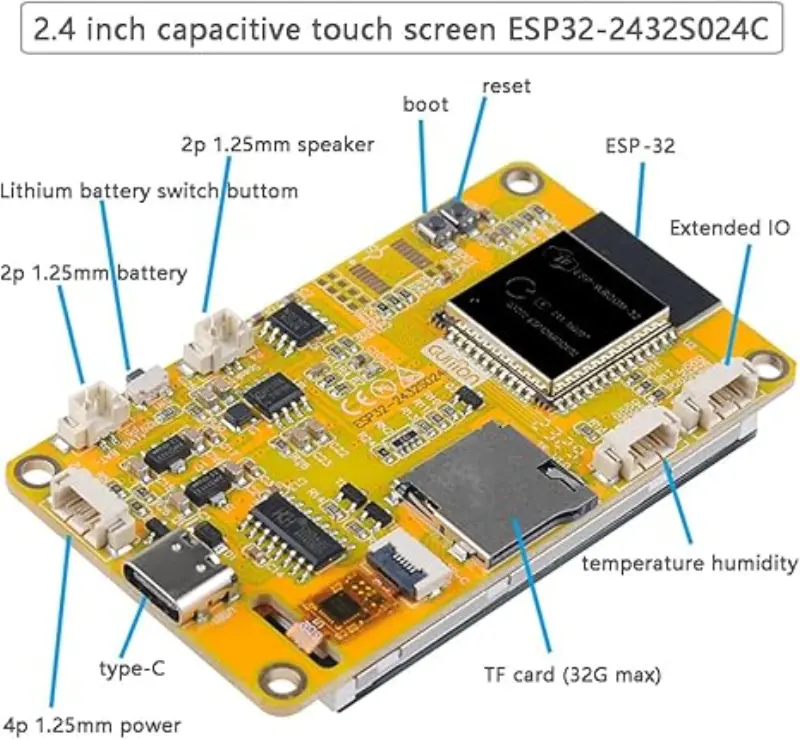
A specialized port of the ESP32-Marauder firmware tailored for the Cheap Yellow Display (CYD) hardware family. It provides a comprehensive suite of WiFi and Bluetooth testing tools, including wardriving, packet capture, and signal analysis, optimized for various ESP32 and ESP32-S3 touch screen modules.