Human Following Robot
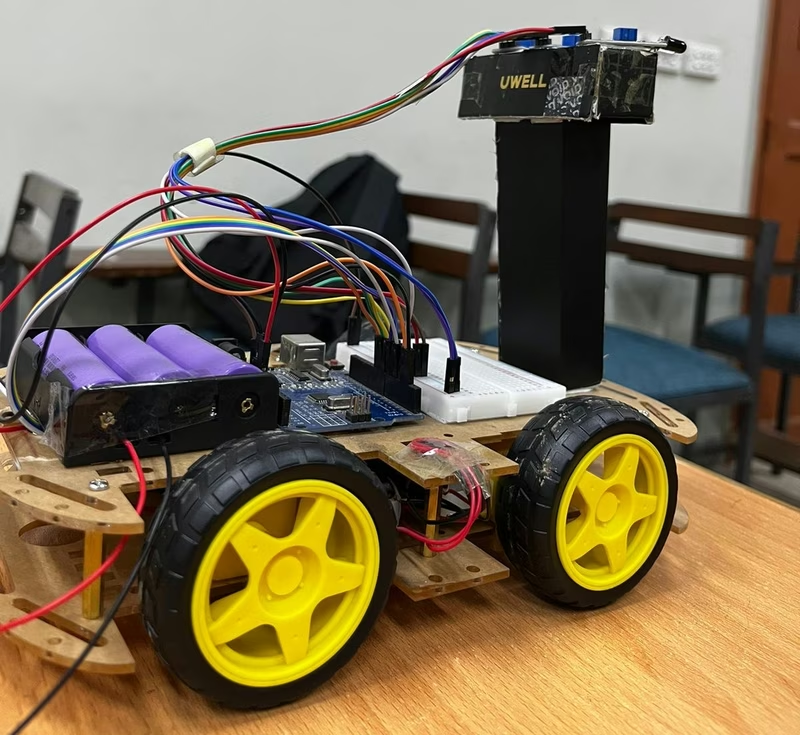
An autonomous mobile robot based on the Arduino Uno that uses a trio of infrared sensors to track and follow a person or object. The system integrates an L298N motor driver for motion control and features a dedicated Lithium-Ion charging circuit for portable operation.
Overview / Introduction
The Human Following Robot is an intelligent mobile platform designed to detect and track a person or object in real-time. By utilizing three infrared (IR) sensors, the robot can identify the relative position of a target—such as a person’s leg or a dark object—and adjust its movement accordingly. Built on the Arduino Uno platform, this project provides a practical implementation of sensor-based decision-making and motor control for autonomous navigation.
Key Features
The robot is designed for responsive movement and smart decision-making. Its primary capabilities include:
- Real-time tracking using three digital IR sensors.
- Dynamic directional control (forward, left, and right) via an L298N motor driver.
- Simple, robust logic that allows it to follow a moving target or a specific path.
- Modular hardware design that is easy to assemble and modify for different use cases.
Hardware and Technical Specifications
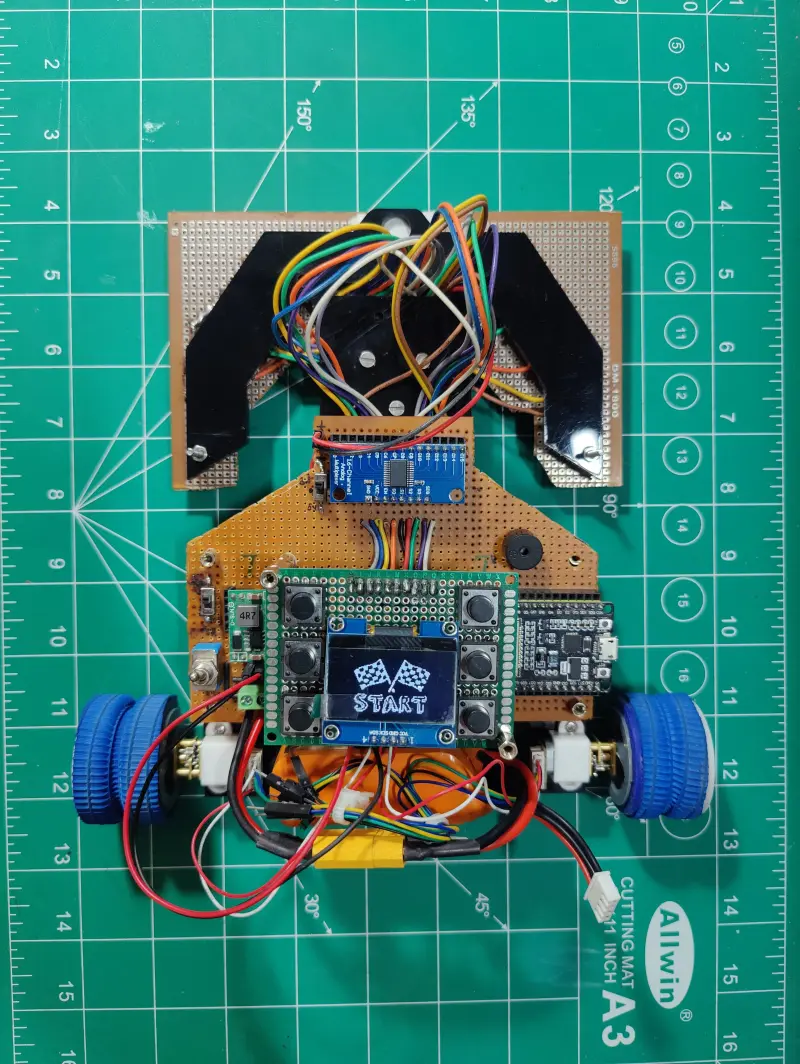
The system is built around the Arduino Uno microcontroller. The movement is handled by four DC motors mounted on a standard robot chassis and controlled by the L298N dual H-bridge motor driver.
Pin Configuration
The wiring for the project is organized to separate sensor inputs from motor control outputs:
- Sensors: The Left, Right, and Middle IR sensors are connected to digital pins D3, D2, and D4 respectively.
- Motor Control: The L298N driver uses pins D10 and D5 for PWM speed control (Enable pins), while pins D9, D8, D7, and D6 handle the directional logic (IN1-IN4).
Decision-Making Logic
The robot operates on a reactive control loop. It continuously polls the three IR sensors to determine the target’s location:
- Forward: Triggered when the middle IR sensor detects an object (reads LOW).
- Left Turn: Triggered when only the left sensor detects an object.
- Right Turn: Triggered when only the right sensor detects an object.
- Stop: If all sensors read HIGH, the robot assumes it has lost the track and halts all motor movement to prevent erratic behavior.
Sensors and Motor Control Explained
Infrared Detection
The core of the tracking system lies in how the IR sensors interpret reflected light. These sensors emit infrared light and measure the reflection. A reflective surface (like white) returns a LOW signal, while an absorptive surface (like dark clothing) returns a HIGH signal. By comparing these values across the three sensors, the robot perceives the direction of the target.
L298N Motor Driver
The L298N module acts as the power interface between the Arduino and the DC motors. It allows the microcontroller to control both the direction and the speed of the motors. Speed is managed via Pulse Width Modulation (PWM) signals sent to the enable pins, while direction is set by toggling the input pins (IN1-IN4) to drive the motors forward or backward.
Power Management and Charging
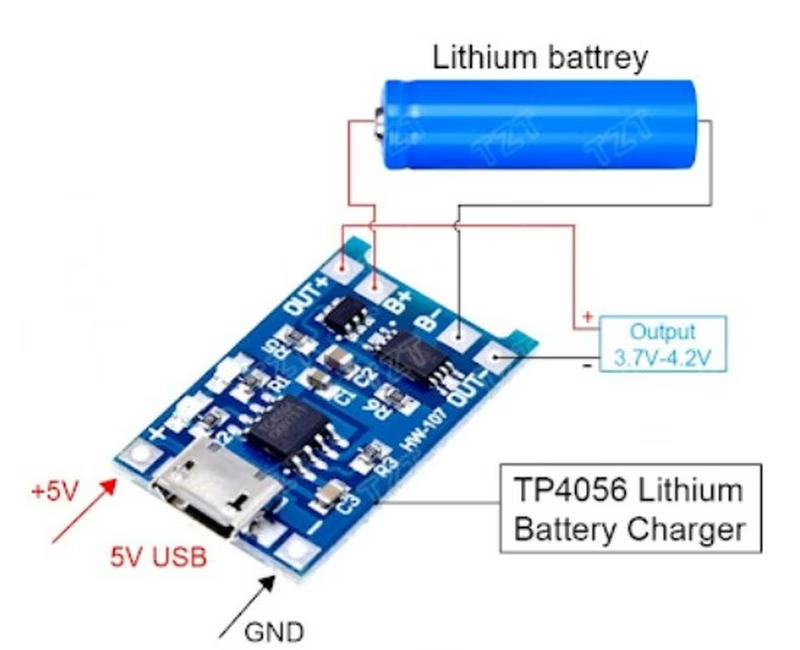
To ensure portability, the robot is powered by a 3.7V Lithium-Ion battery (such as an 18650 cell). The project includes a dedicated charging circuit using the TP4056 module. This module provides a safe way to charge the battery via a 5V USB source, featuring over-voltage protection and LED status indicators (Red for charging, Blue/Green for fully charged).
Safety and Maintenance
When working with Lithium-Ion batteries, it is essential to use protected modules to avoid short circuits or over-discharge. The TP4056 ensures the battery reaches its 4.2V cut-off voltage safely, making the robot reliable for extended use in various environments.
Demonstration and Applications
Once assembled and programmed via the Arduino IDE, the robot is ready to follow any dark object placed in front of its sensor array. This technology serves as a foundational step for more complex applications, such as autonomous shopping carts, personal delivery bots, or educational kits for learning robotics and sensor integration.
Related Projects
Voice-Controlled Ground and Aerial Robot
A multi-modal robotic control system that translates spoken commands into physical actions using an ESP32-S3 for audio capture and an Arduino UNO for motor execution. The project integrates high-level AI services including Deepgram for transcription, GPT-4o for intent analysis, and 60db for text-to-speech feedback.

Wall-Following Robot
An autonomous maze-navigating robot built on the Arduino Uno platform that uses a PD controller to maintain its position between walls. It integrates ultrasonic sensors for distance sensing, an IMU for precise turning, and an ESP-01 module to report its navigation sequence over WiFi.
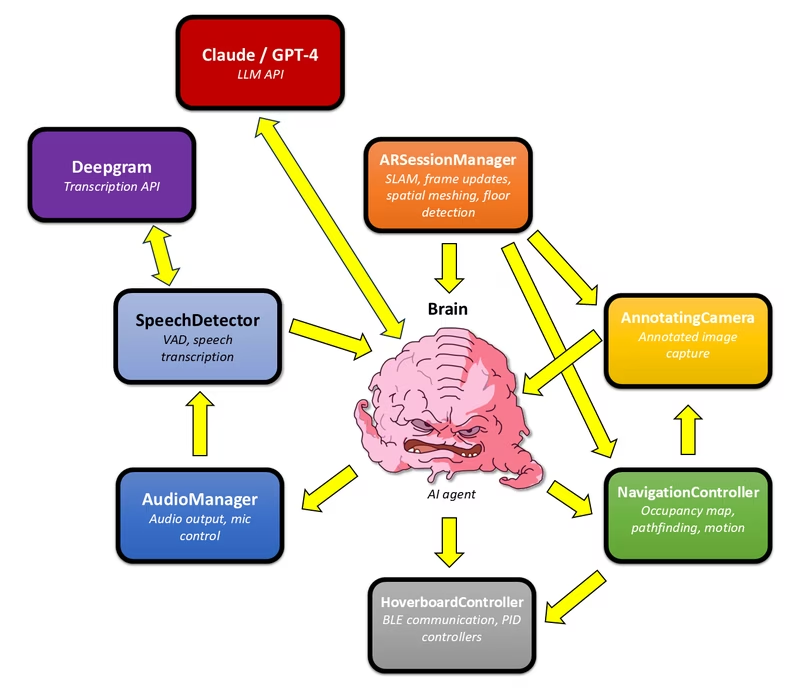
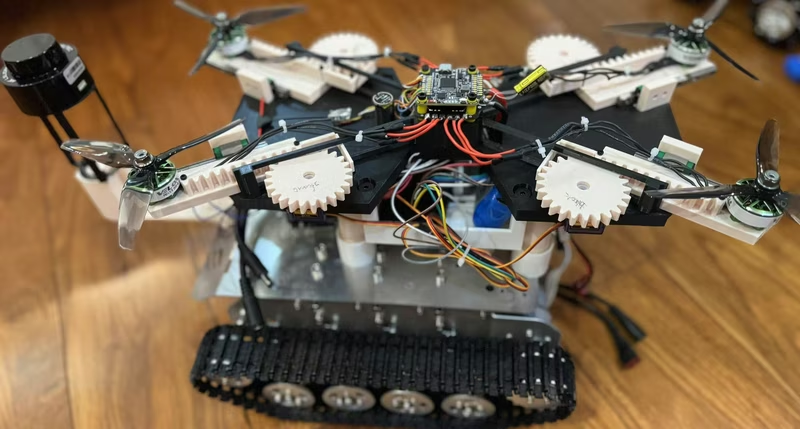
RoBart: Autonomous LLM-controlled Robot
RoBart is an autonomous mobile robot that uses an iPhone Pro for compute and sensing, controlled by Large Language Models like Claude and GPT-4. It features a custom mobile base built from a salvaged hoverboard and an Adafruit Feather nRF52, leveraging ARKit for SLAM, spatial mapping, and navigation.
16 IR Array PID Line Follower Robot using ESP32
An advanced autonomous line follower robot utilizing a 16-channel IR sensor array and PID control. Powered by an ESP32 running MicroPython, the system features an OLED-based configuration menu for real-time tuning of control parameters and persistent storage of PID constants.
EVA-RT Robotracer
A high-performance robotracer featuring a centrifugal fan for increased downforce and specialized side sensors for curve detection. Built on the ATMEGA328P microcontroller, the project includes complete source code, PCB designs, and 3D models for a competitive line-following robot.