FOC_Pocket
FOC_Pocket is a compact, coin-sized brushless motor controller based on the ESP32-S3 and the SimpleFOC library. It utilizes highly integrated MPS chips, including the MP6541A driver and MA600A magnetic encoder, to provide precise position, speed, and torque control for small gimbal motors.
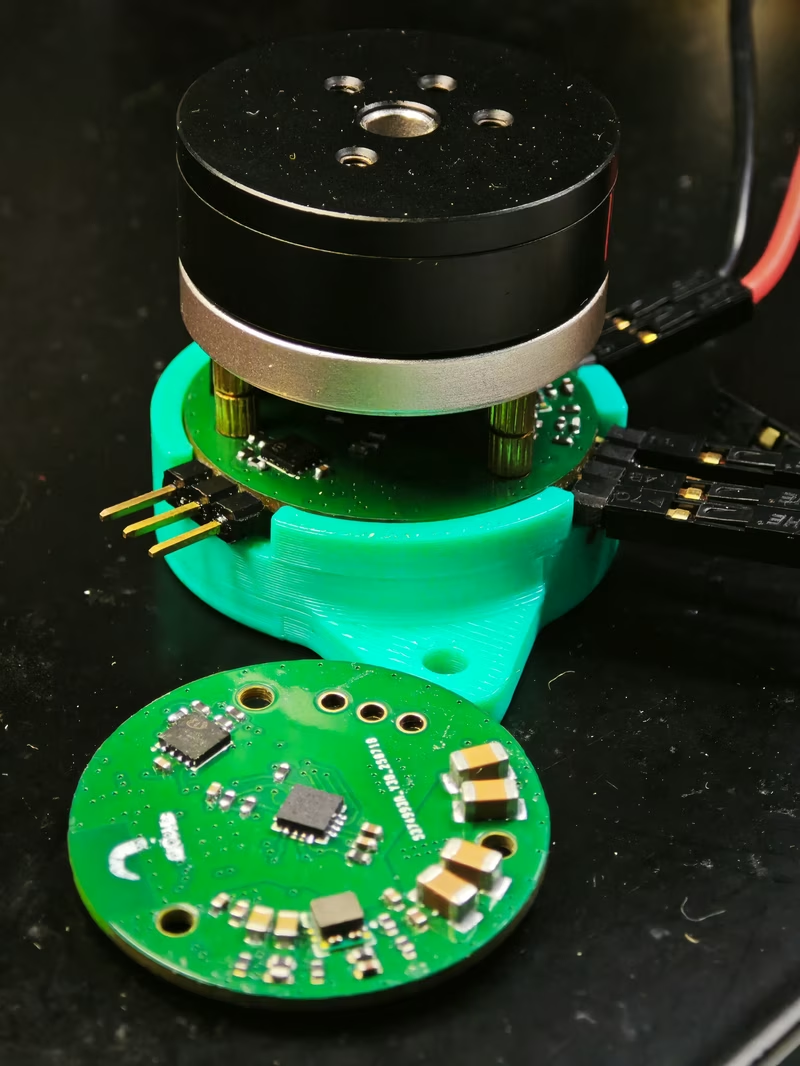
FOC_Pocket is an embedded systems project born from the desire to learn Field Oriented Control (FOC) while leveraging highly integrated modern components. The project centers around a “coin-size” form factor, specifically designed to drive 2204-style brushless gimbal motors using a high-performance MPS (Monolithic Power Systems) chip stack and the ESP32-S3 microcontroller.
Hardware Architecture
The hardware design is built around a suite of specialized chips to minimize footprint while maximizing performance:
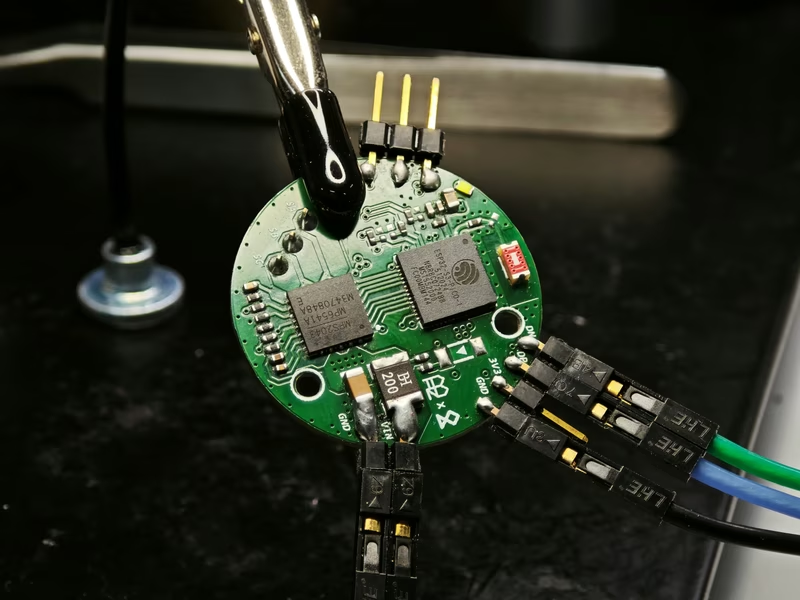
- ESP32-S3-PICO-1-N8R8: The main controller providing Wi-Fi, Bluetooth, and sufficient processing power for FOC calculations.
- MP6541A: An integrated brushless motor driver that combines six N-channel power MOSFETs with bidirectional current sensing on the low-side of each bridge arm.
- MA600A: A high-precision magnetic encoder with a Tunnel Magnetoresistance (TMR) sensor, offering absolute angle detection over SPI.
- MPM3632S: A compact synchronous step-down buck module that converts the main bus voltage to 3.3V for the logic circuitry.
- SIT3051TK: A CAN bus transceiver for future multi-device communication.
Current Sensing and Driver Logic
The MP6541A is the heart of the motor drive system. Unlike discrete solutions that require external shunts, the MP6541A integrates current sampling within its low-side MOSFETs. The chip outputs a current signal on SOx pins that is proportional to the phase current.
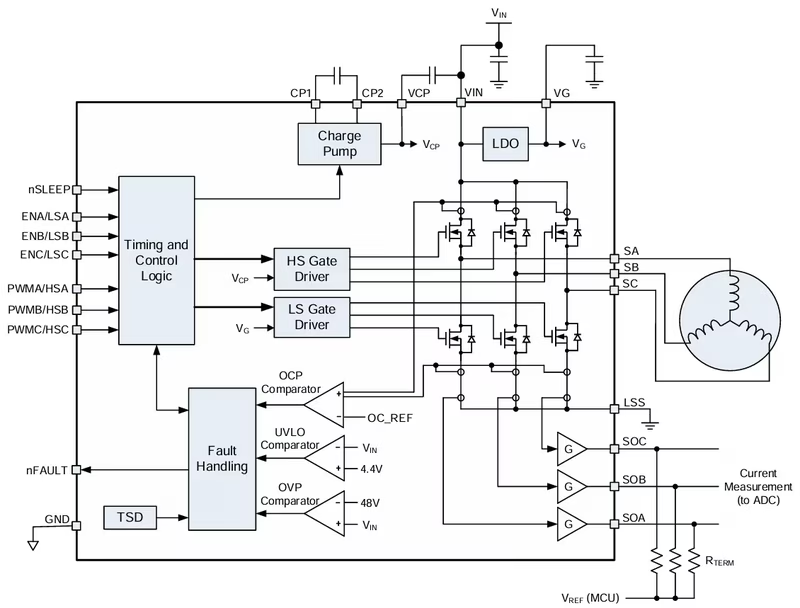
To interface this with the ESP32-S3’s ADC, the design uses a reference resistor (RREF) to convert the current signal into a voltage. The zero-current state is calibrated at startup to account for the reference voltage (VREF). The software implementation performs real-time ADC sampling, applies offset compensation for each phase (A, B, and C), and converts the raw voltage into milliamps using the specific current-sense ratios of the chip.
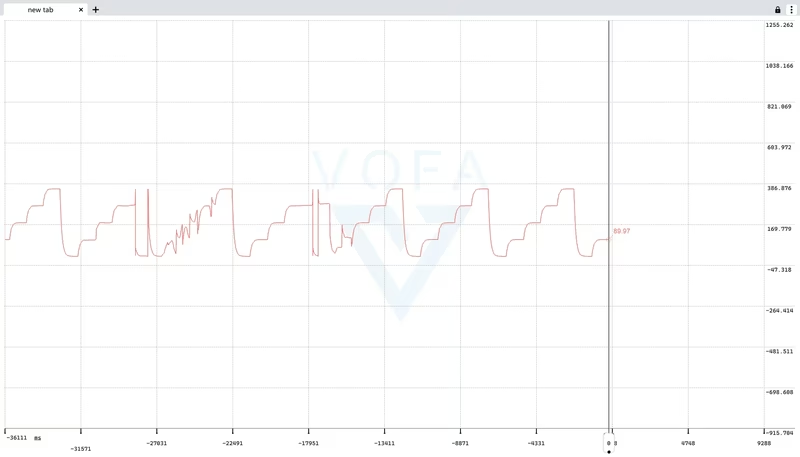
Magnetic Encoder Integration
For feedback, the project utilizes the MA600A magnetic encoder. This sensor supports high-speed SPI communication (up to 25MHz) and provides 16-bit resolution. The software includes a custom driver that inherits from the SimpleFOC Sensor class, overriding the getSensorAngle method to fetch raw position data and convert it into radians.
One significant advantage of the MA600A is its internal filtering, which provides stable angle data without the need for additional software-side window filters. In testing, the sensor achieved an accuracy of approximately ±0.04° without extensive calibration.
Power Management and Safety
The MPM3632S buck module handles the power conversion from the main bus (up to 18V) down to the 3.3V logic level. A hardware-configurable voltage divider is used to monitor the bus voltage. By default, it is set to a 7.2V threshold to protect 2S lithium batteries from over-discharge, though this can be bypassed for USB-powered operation.
FOC Control and Software Design
The software is implemented using a modified version of the esp_simplefoc library within the ESP-IDF framework. The project includes several example applications:
- Open-loop control: For basic motor verification.
- Closed-loop Velocity/Position control: Utilizing the MA600A feedback for precise motion.
- Torque control: Leveraging the integrated current sensing for force-feedback applications.
The motor parameters for the target 2204 motor are specifically tuned, with 7 pole pairs, a phase resistance of 3.25Ω, and a KV rating of 330. The control loop initialization involves linking the MA600A sensor and the MP6541A driver to the SimpleFOC BLDCMotor object, setting PID parameters for velocity and angle loops, and performing the FOC alignment sequence.
Related Projects
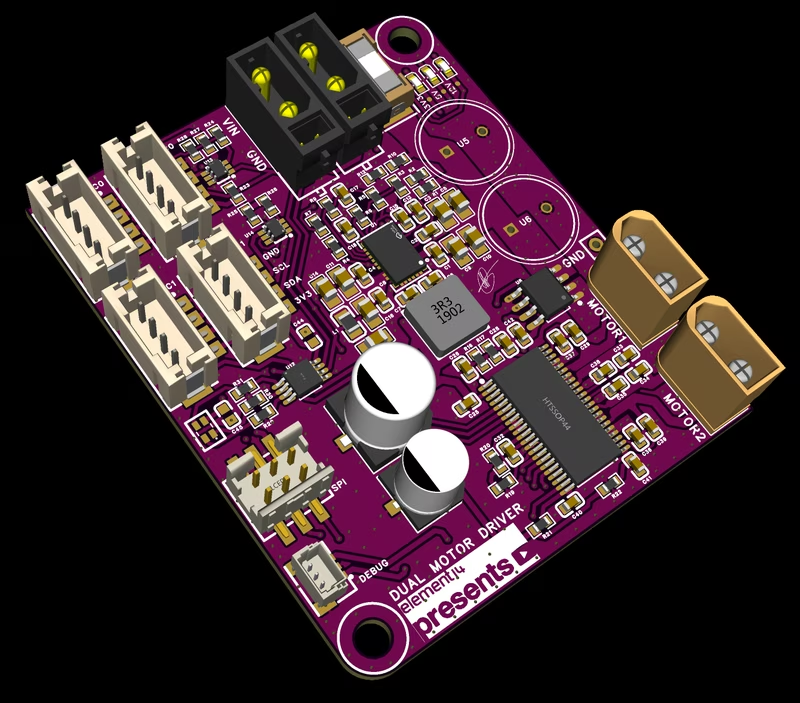
OpenDualMotorDriver
OpenDualMotorDriver is an open-source, high-performance dual H-bridge motor controller powered by the Raspberry Pi RP2350 microcontroller and Texas Instruments DRV8412 driver. It supports brushed DC motor control from 4V to 40V with integrated current sensing, magnetic encoder feedback, and a comprehensive serial API for closed-loop position and speed control.
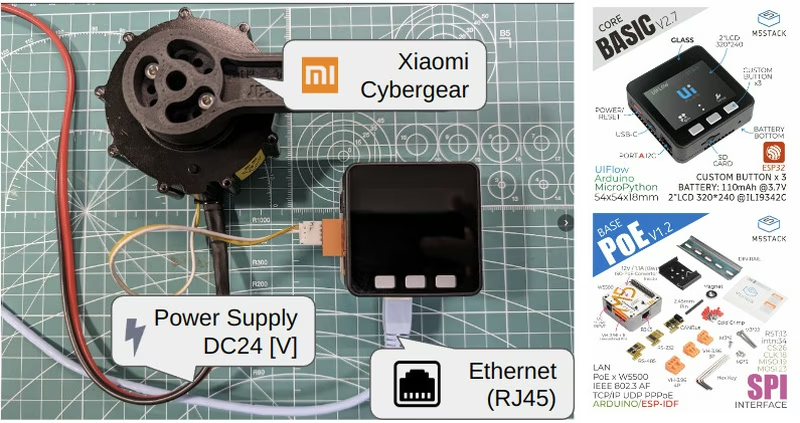
Cybergear ROS2 Controller
A ROS 2 bridge for controlling Xiaomi Cybergear motors using M5Stack hardware via micro-ROS and Ethernet. The system supports multiple motor configurations, real-time control modes, and parameter tuning through standard ROS 2 interfaces.
X-Knob: A Smart Knob Based on LVGL UI Framework
X-Knob is an open-source smart knob project featuring a brushless motor for haptic feedback and a circular LCD for a dynamic UI. It is built using the ESP32-S3 microcontroller, the LVGL graphics library, and the X-TRACK UI framework, supporting features like MQTT integration for Home Assistant and Surface Dial functionality.