Autonomous Racing Robot (STM32 + ROS1)
A differential-drive autonomous robot utilizing an STM32F446RE for real-time motor control and ROS1 Noetic for mapping and navigation. The system employs a transparent Bluetooth communication link to perform laser-only SLAM via hector_slam on a remote host, optimizing performance for high-speed racing in static environments without the need for traditional odometry.
Building an autonomous robot often involves a complex dance between low-level hardware control and high-level spatial reasoning. This project simplifies that relationship through a minimalist, high-speed racing robot that bridges the gap between an STM32-based embedded system and the ROS1 (Noetic) ecosystem. Designed with a focus on efficiency and resource-constrained environments, the robot excels at navigating unknown static mazes using a “transparent transmission” architecture.
System Architecture and Communication
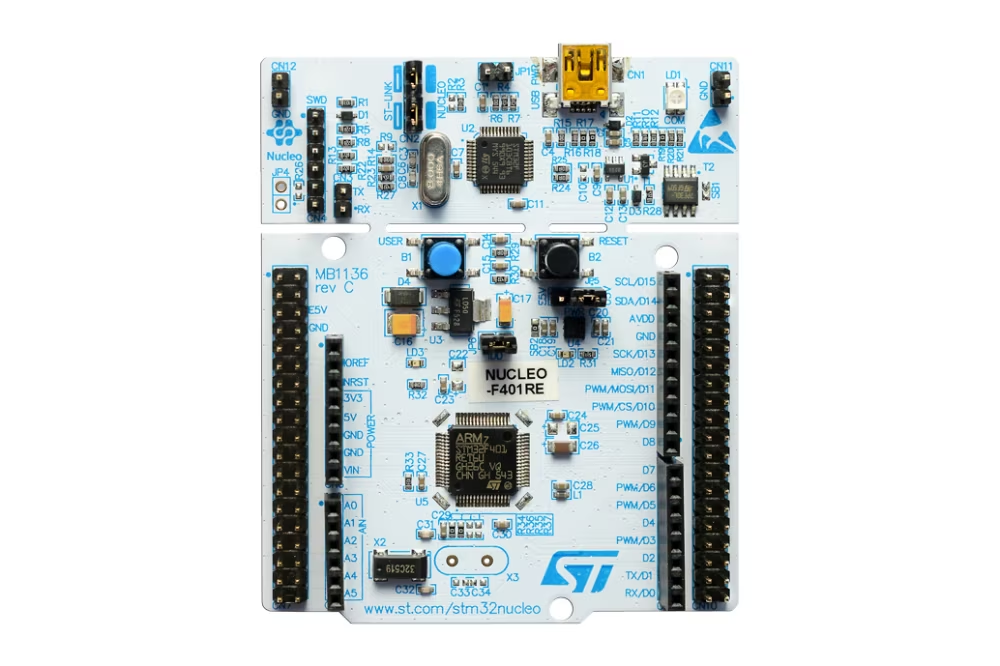
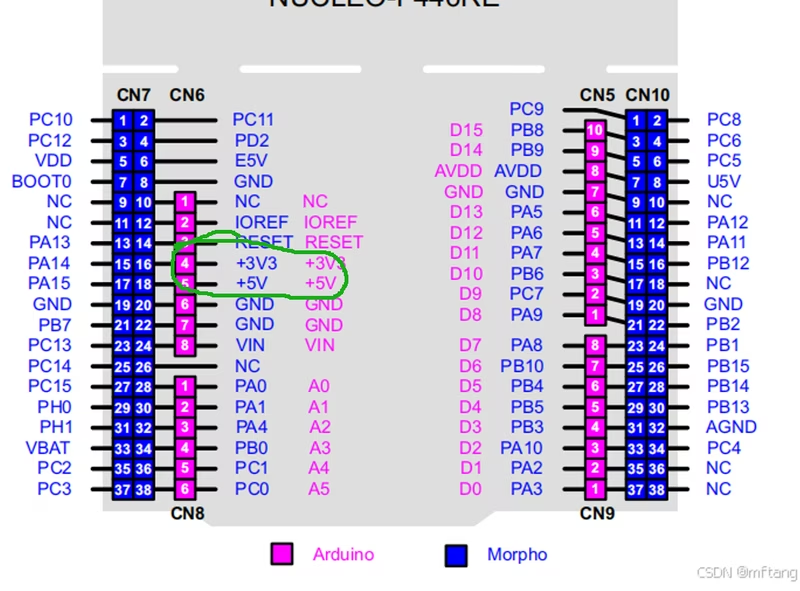
The project is built around a differential-drive chassis powered by an STM32F446RE (Nucleo-64) development board. What makes this implementation unique is its communication model. Rather than processing heavy LiDAR data or calculating complex odometry on the microcontroller, the system uses a transparent Bluetooth relay.
The STM32 acts as a high-speed data conduit. It reads raw hexadecimal streams from an RPLIDAR C1 and prepends a custom frame header before forwarding the data directly to a remote ROS host. On the return path, the ROS host sends lightweight velocity command frames which the STM32 translates into high-response PID motor control. This design significantly reduces the computational load on the embedded side, allowing the MCU to focus entirely on precise motor execution and sensor acquisition.
Odometry-Free SLAM
A common challenge in robotics is the accumulation of error in wheel encoders, especially at high speeds. This project sidesteps that issue entirely by adopting an open-loop control architecture on the hardware side. By utilizing hector_slam on the ROS host, the robot performs laser-only SLAM. This means the system builds maps and determines its position based solely on LiDAR scans, removing the dependency on /odom messages. This approach is particularly effective in static environments where the laser can provide high-frequency updates to the navigation stack.
Optimized Racing Navigation
Navigation is handled by a customized move_base local planner. Unlike traditional planners that prioritize cautious obstacle avoidance and complex costmap filtering, this project’s planner is stripped down for speed. By disabling real-time costmap updates, the robot achieves the high-speed path tracking required for racing scenarios.
A dedicated “referee node” provides the logic for autonomous missions. Users can input target coordinates relative to the starting point, and the robot will autonomously explore the environment, map it in real-time, reach the goal, and return to the start.
Hardware Integration
The hardware stack is a blend of precision sensors and robust motor drivers:
- Controller: NUCLEO-F446RE (STM32F4 series).
- Sensors: RPLIDAR C1 for environment scanning and an MPU6050 IMU for orientation data.
- Actuation: MCS20 motors with Hall encoders (used for local PID loops) driven by an ATB236 dual-channel module.
- Communication: HC-04 Bluetooth module for long-range transparent data transmission.
Use Cases and Applications
This project serves as an excellent reference for several scenarios:
- Remote SLAM Architectures: Ideal for developers looking to offload heavy computation (like SLAM and path planning) from the robot to a powerful remote server or workstation.
- Autonomous Racing: A solid foundation for “go-to-goal-and-return” competitions in static environments.
- Educational Prototyping: A clear example of how to integrate STM32CubeMX-generated HAL code with the ROS navigation stack using custom serial protocols.
By prioritizing a lightweight design and focusing on the synergy between transparent data transmission and laser-only localization, this project demonstrates a streamlined path to high-speed autonomous navigation.
Related Projects
NoeticMaze
NoeticMaze is an embedded navigation and control system for the NUCLEO-F446RE development board, integrating Lidar, IMU, and motor control. Built on FreeRTOS, it implements advanced robotics algorithms including ICP-based localization, grid mapping, and A* path planning for autonomous differential-drive robots.
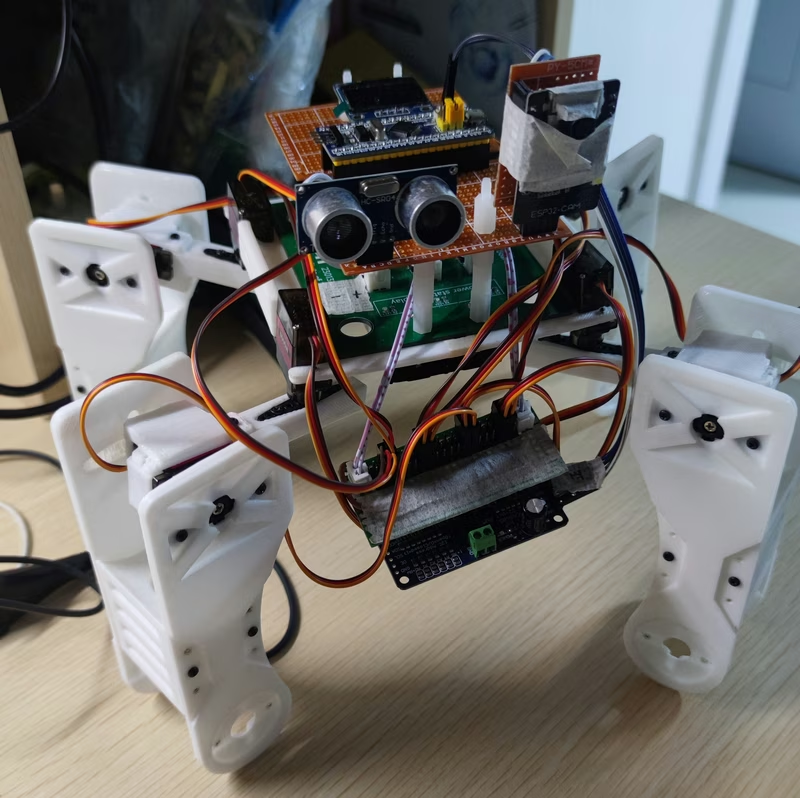
STM32F103 Quadruped Robot
A sophisticated quadruped crawling robot powered by an STM32F103C8T6 microcontroller and an ESP32-CAM for real-time vision and remote connectivity. It utilizes FreeRTOS for multi-tasking and MicroPython for the wireless communication stack, supporting both cloud-based MQTT control via a mobile app and local control through a web interface.
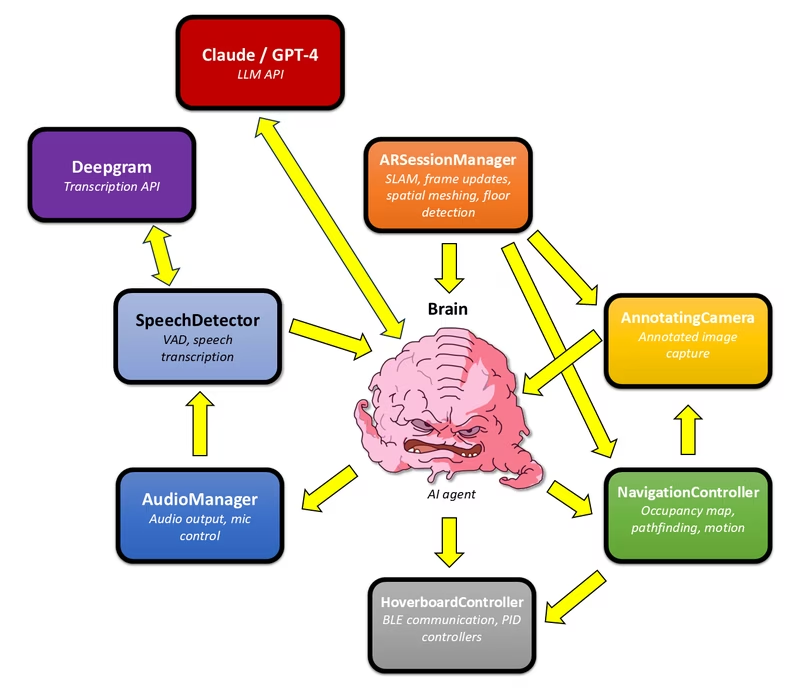
RoBart: Autonomous LLM-controlled Robot
RoBart is an autonomous mobile robot that uses an iPhone Pro for compute and sensing, controlled by Large Language Models like Claude and GPT-4. It features a custom mobile base built from a salvaged hoverboard and an Adafruit Feather nRF52, leveraging ARKit for SLAM, spatial mapping, and navigation.

Mobile Mecanum 4WD Robot
A comprehensive robotics project featuring a 4WD mobile platform equipped with omnidirectional Mecanum wheels. It utilizes a dual-controller architecture with a Raspberry Pi running ROS1/ROS2 and an Arduino Mega for low-level motor control and sensor interfacing. The system implements PID control for precise movement and supports joystick operation via a ROS-based communication bridge.