Mercury Transforming Drone
Mercury is a multi-modal transforming drone platform that combines aerial flight and ground-based driving capabilities. It utilizes a Raspberry Pi 5 for high-level autonomy and an ArduPilot-based flight controller for stable dynamics, featuring a unique transformation mechanism powered by linear actuators.
Overview
Mercury is a sophisticated, multi-modal robotic platform designed to navigate both the air and the ground. By integrating high-performance computing with robust flight control, the project demonstrates a “transforming” capability that allows it to switch between a quadcopter configuration and a ground-based rover. This versatility makes it an ideal platform for search and rescue, payload delivery, and advanced robotics research.
System Architecture
The heart of Mercury’s control system is a dual-processor architecture. A Raspberry Pi 5 serves as the companion computer, handling high-level autonomy, vision processing, and the web-based user interface. For low-level flight dynamics and motor control, the project utilizes a Cube Flight Controller running the ArduPilot stack, which typically operates on the ChibiOS RTOS for high-reliability real-time performance.
Communication between these two systems is managed via a Mavproxy bridge. This setup allows the Python-based autonomy software on the Pi to send commands to the flight controller, enabling features like autonomous mission execution and real-time telemetry streaming.
Transformation and Hardware
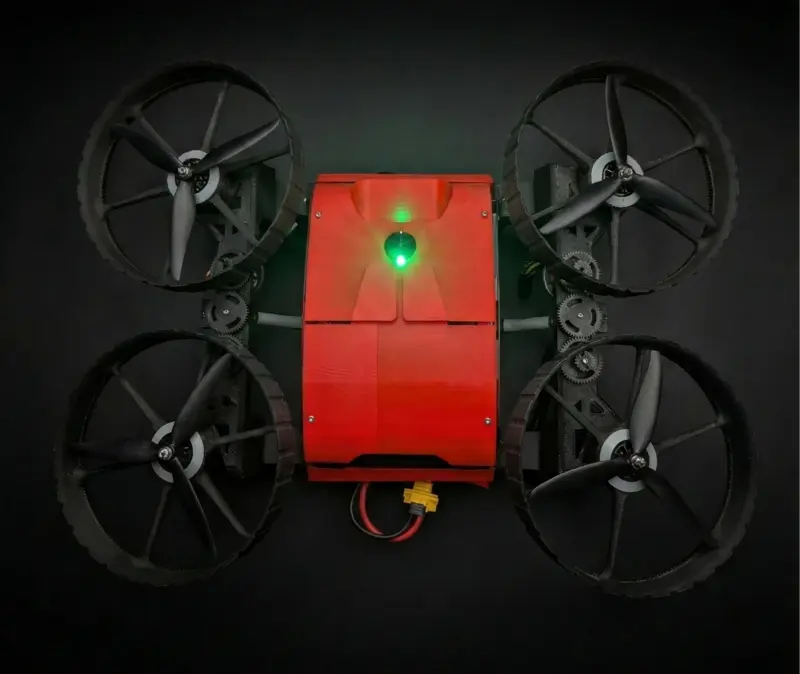
What sets Mercury apart is its mechanical transformation system. Using two 120N linear actuators, the drone can adjust its arm positions to transition between flight and drive modes:
- Aerial Mode: Utilizes four BLDC motors with 8-inch propellers for vertical takeoff and maneuverability.
- Ground Mode: Employs dedicated 140KV BLDC driving motors and a gear system to move as a wheeled rover.
- Payload: The design includes a 1kg inner payload bay, protected by a 3D-printed shell.
The frame is a hybrid construction, utilizing Carbon Fiber sheets for structural rigidity and PLA-CF (Carbon Fiber reinforced PLA) for 3D-printed components like motor holders and gear assemblies.
Sensing and Autonomy
Mercury is equipped with an extensive sensor suite to perceive its environment:
- Vision: A combination of RGB USB webcams, Depth cameras, and Thermal imaging sensors.
- Positioning: GPS integrated with ArduPilot and an Optical Flow (MTF-01) sensor for stable hovering in GPS-denied environments.
- Proximity: A Time-of-Flight (TOF) camera for obstacle detection and distance measurement.
- Orientation: Dual MPU 9250 IMUs for precise attitude estimation.
Software Stack
The autonomy software is written in Python and designed to be modular. It includes a web-based control dashboard built with Three.js for 3D visualization and Leaflet for map-based navigation. The system also supports remote connectivity via Tailscale, allowing the drone to be controlled over long distances using mobile data dongles.
Getting Started
The project is open-source under the CERN Open Hardware Licence. Developers can get started by setting up the autonomy software on a Raspberry Pi 5. The process involves creating a Python virtual environment, installing dependencies from the provided requirements.txt, and running the Mavproxy bridge alongside the main robot software. For those looking to build the hardware, the repository includes a detailed Bill of Materials and STL files for all 3D-printed parts.